
CS7N65A3R:电子领域的卓越之选
2024-09-26 15:12:52

介绍目录
1. 硬件电路原理
2. FOC控制原理
3. 空间矢量调制(SVPWM)
4. 电流采样方式选择
5. 角度估算器
6. 霍尔FOC程序
1. 硬件电路原理
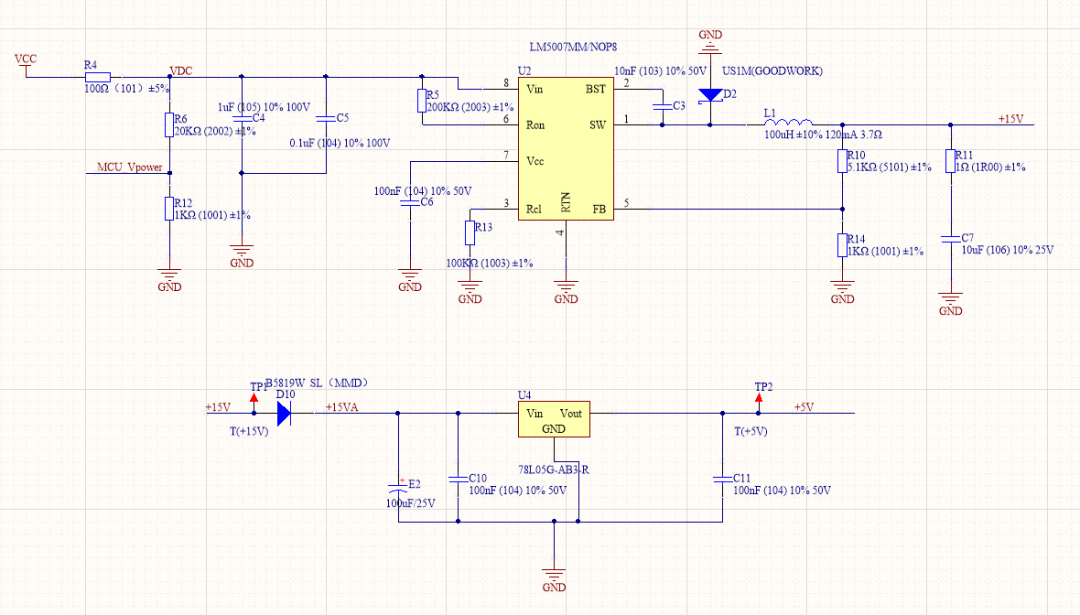
电源电路 :
第一部分:使用的开关电源芯片LM5009降压;
优点:有点效率高,稳定。
缺点:电路复杂。
第二部分:使用78L05LDO线性降压芯片;
优点:电路简单,成本低。
缺点:转换效率低,输入电压低。
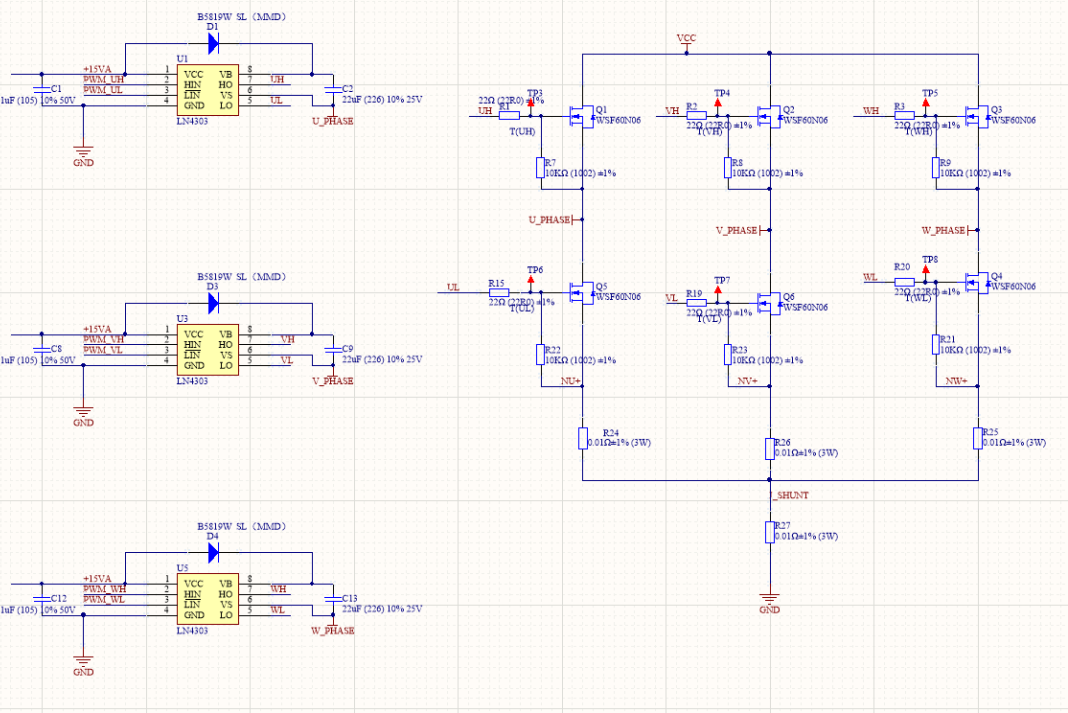
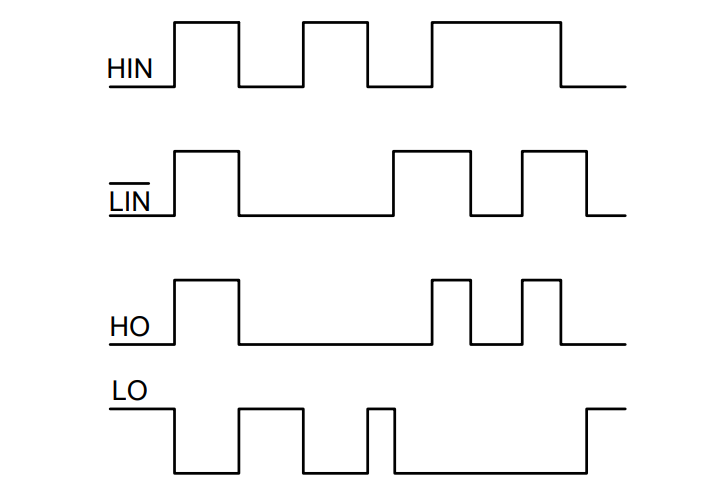
驱动芯片电路:使用LN4303芯片,22uF的自举电容。
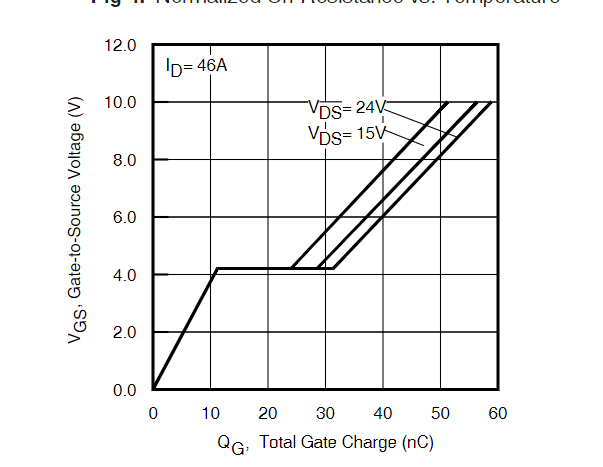
半桥电路:使用60V60A规格MOS,MOS充电限流电阻22欧姆;MOS存在米勒平台,所以加入死区,防止上下管导通。
采样电路:相电流采样:R24、R26、R25;母线电流采样:R27。
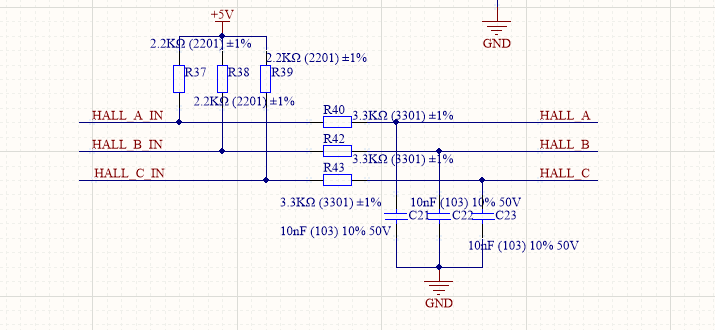
霍尔电路 :
霍尔电源电源是5v供电,使用的开关霍尔,上拉电路。
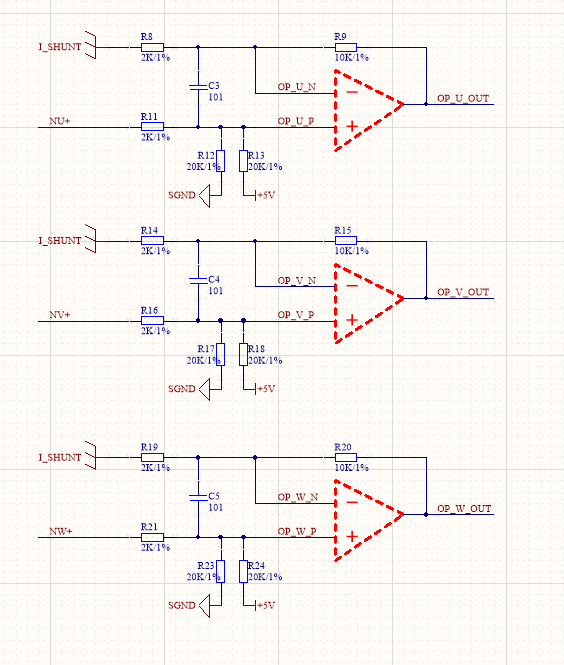
三路运放:
1. 平均电流、W相、V相电流采样放大
2. 放大倍数5倍
3. 偏置电压2.5V
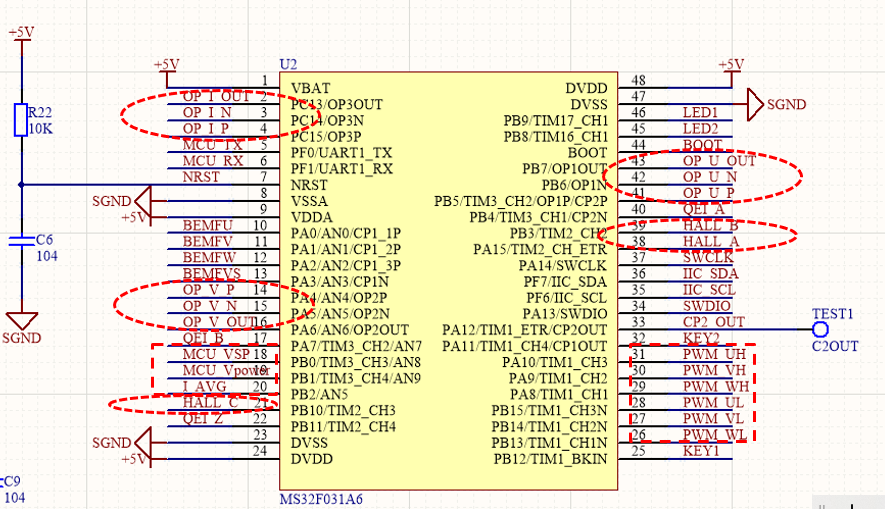
MCU外设资源 :
1. PWM输出,6路互补PWM
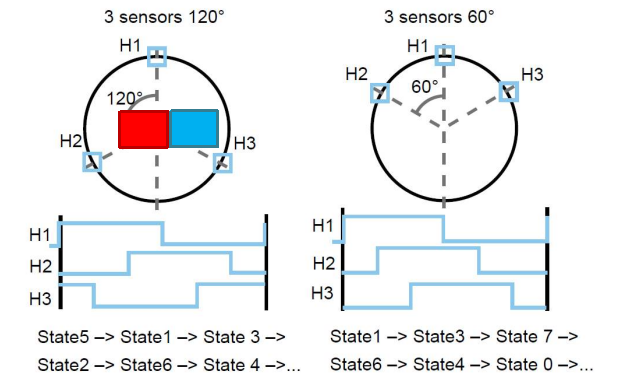
2. HALL捕获,3路HALL捕获
3. 采样电流使用3组运放
4. 母线电压和电位器ADC采样
2. FOC控制原理
FOC---磁场定向控制(Field Oriented
Control)
通常称为“矢量控制”,是通过控制变频器输出电压的幅值和频率控制三相交流电机的一种变频驱动控制方法。
基本思想
通过测量和控制电机的定子电流矢量,根据磁场定向控制原理分别对电机的励磁电流(Id)和转矩电流(Iq)进行控制,从而将三相交流电机等效为直流电机控制。
实现步骤
通过坐标变换,将三相静止坐标系转化为两相旋转的坐标系,从而使三相交流耦合的定子电流转换为相互正交、独立解耦的转矩和励磁分量,达到类似于他励电机直接控制转矩的目的。
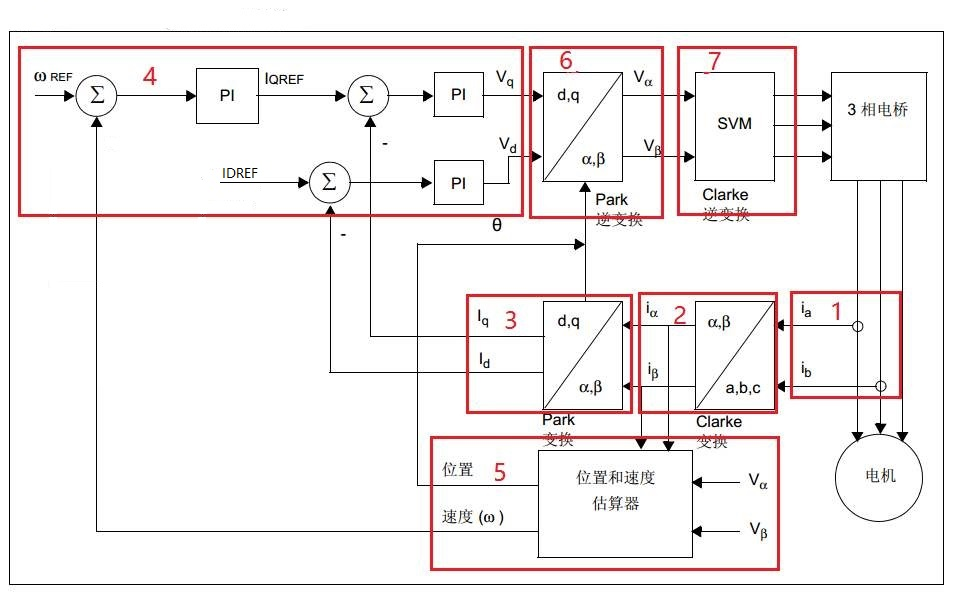
FOC控制框图
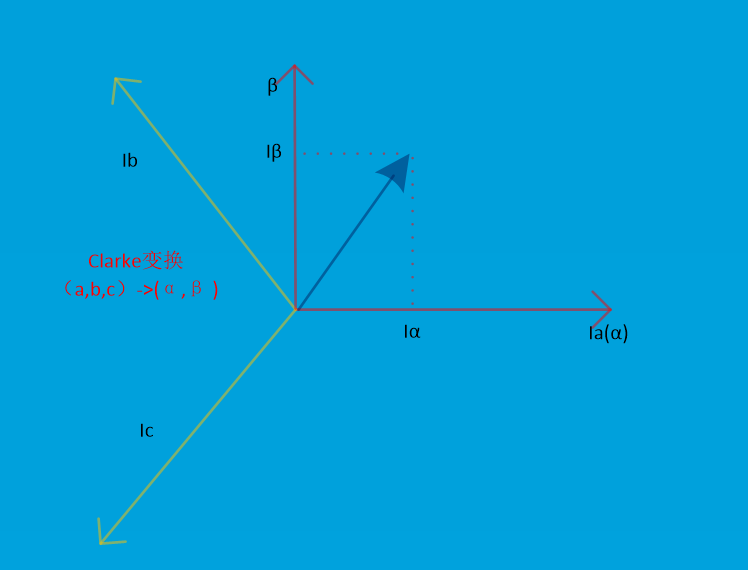
Clarke变换
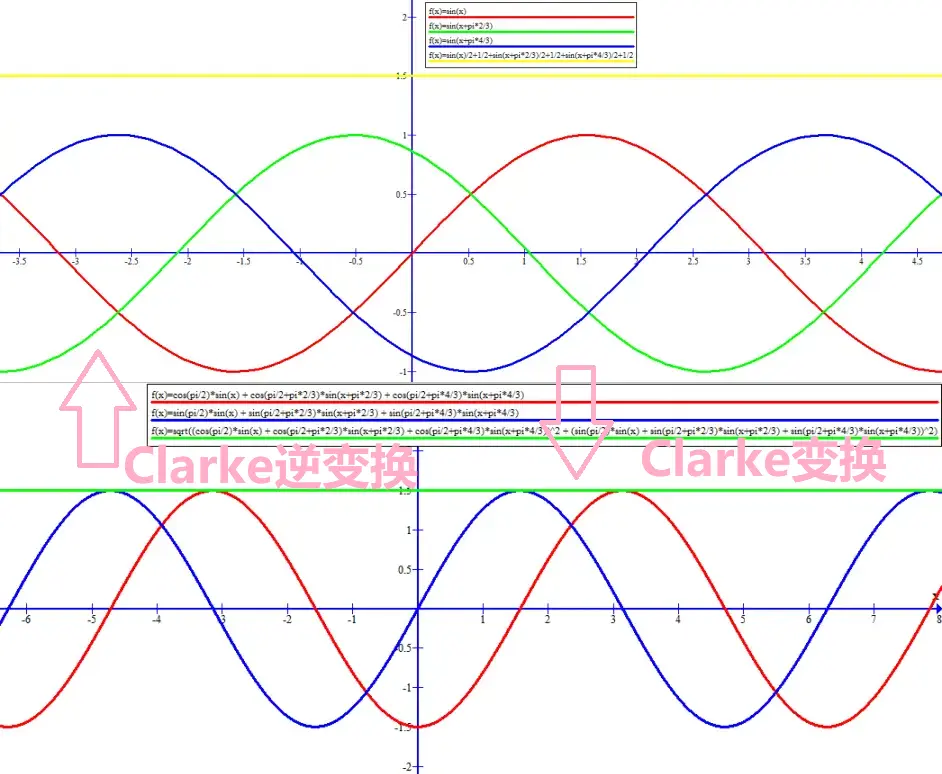
三相采样电流转化成两相电流Ia、Iβ

Park变换
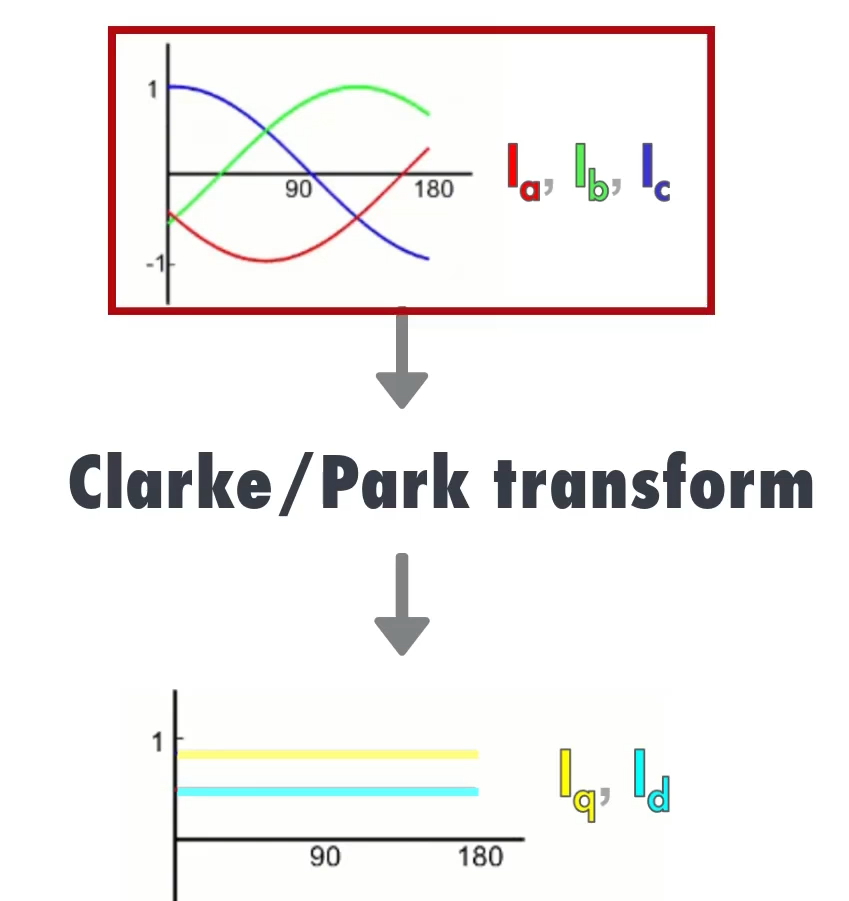
两相电流转换成旋转的直流电流Iq、Id
3. 空间矢量调制(SVPWM)
由于逆变器三相桥臂共有6个开关管,为了研究各相上下桥臂不同开关组合时逆变器输出的空间电压矢量,特定义开关函数:
Sx ( x = a、b、c) 为:
(Sa、Sb、Sc)的全部可能组合共有八个,包括6个非零矢量 Ul(001)、U2(010)、U3(011)、U4(100)、U5(101)、U6(110)、和两个零矢量 U0(000)、U7(111)。以其中一种开关组合为例分析,假设:
Sx ( x= a、b、c)= (100)
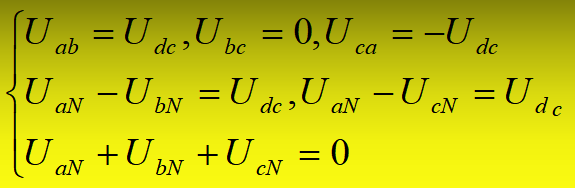
求解上述方程可得:Uan=2Ud /3、UbN=-U d/3、UcN=-Ud /3。同理可计算出其它各种组合下的空间电压矢量,列表如下:
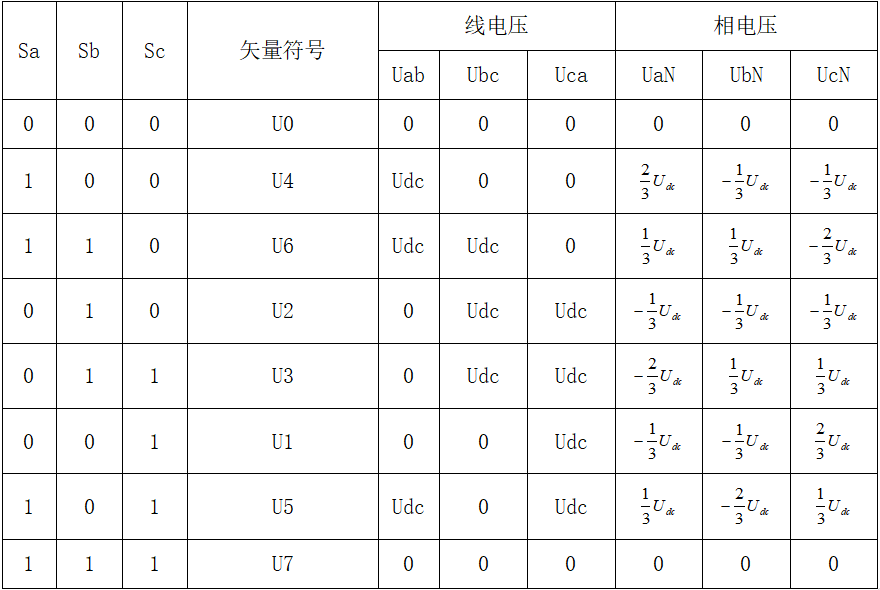
开关状态与相电压和线电压的对应关系
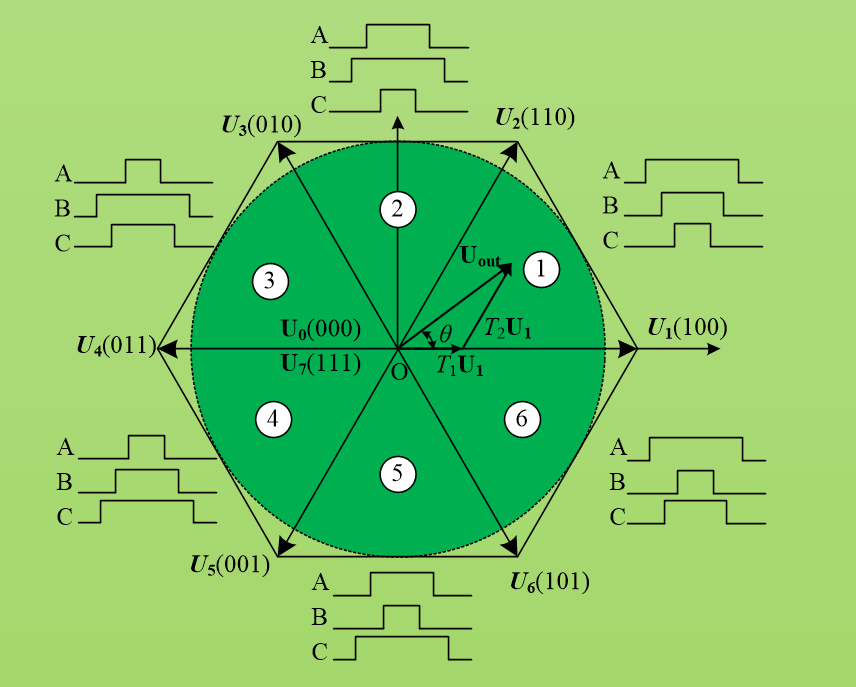
电压空间矢量图
其中非零矢量的幅值相同(模长为 2Udc/3),相邻的矢量间隔 60°,而两个零矢量幅值为零,位于中心。在每一个扇区,选择相邻的两个电压矢量以及零矢量,按照伏秒平衡的原则来合成每个扇区内的任意电压矢量,即:

或者等效成下式:

其中,Uref 为期望电压矢量;T为采样周期;Tx、Ty、T0分别为对应两个非零电压矢量 Ux、Uy 和零电压矢量 U 0在一个采样周期的作用时间;其中U0包括了U0和U7两个零矢量。上式的意义是:矢量 Uref 在 T 时间内所产生的积分效果值和 Ux、Uy、U 0 分别在时间 Tx、Ty、T0内产生的积分效果相加总和值相同。
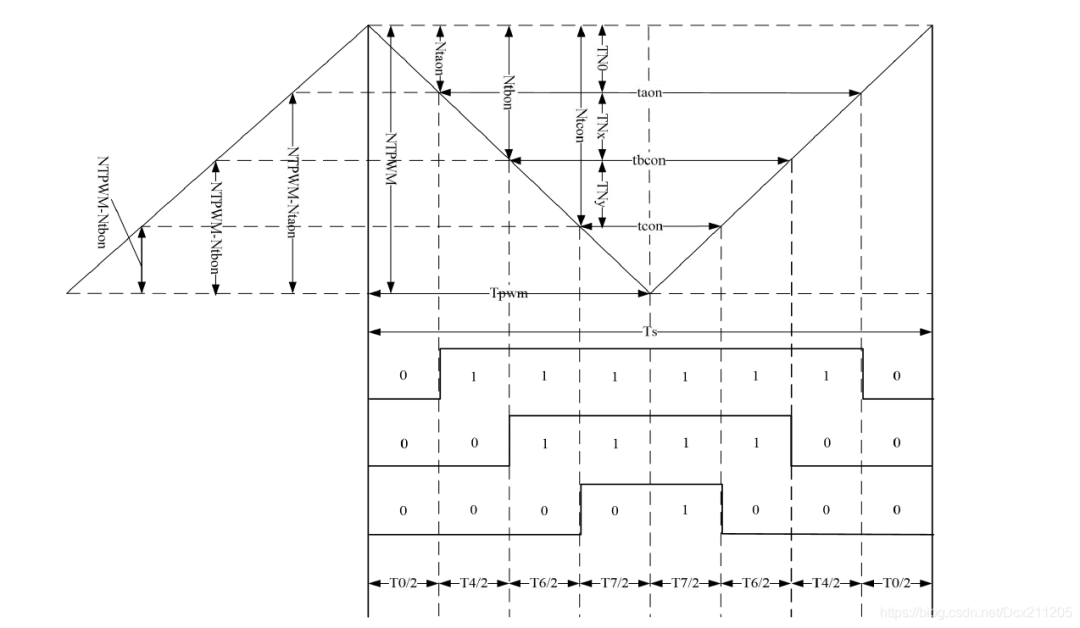
定时器计数模式及PWM产生