
CS7N65A3R:电子领域的卓越之选
2024-09-26 15:12:52

1. 硬件电路原理
2. FOC控制原理
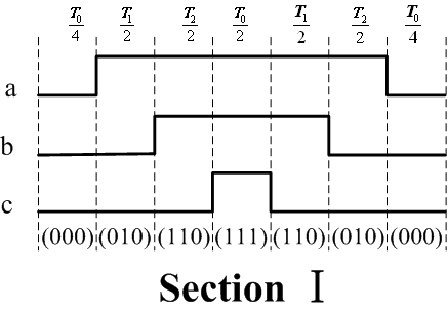
3. 空间矢量调制(SVPWM)
4. 电流采样方式选择
5. 角度估算器
6. 霍尔FOC程序
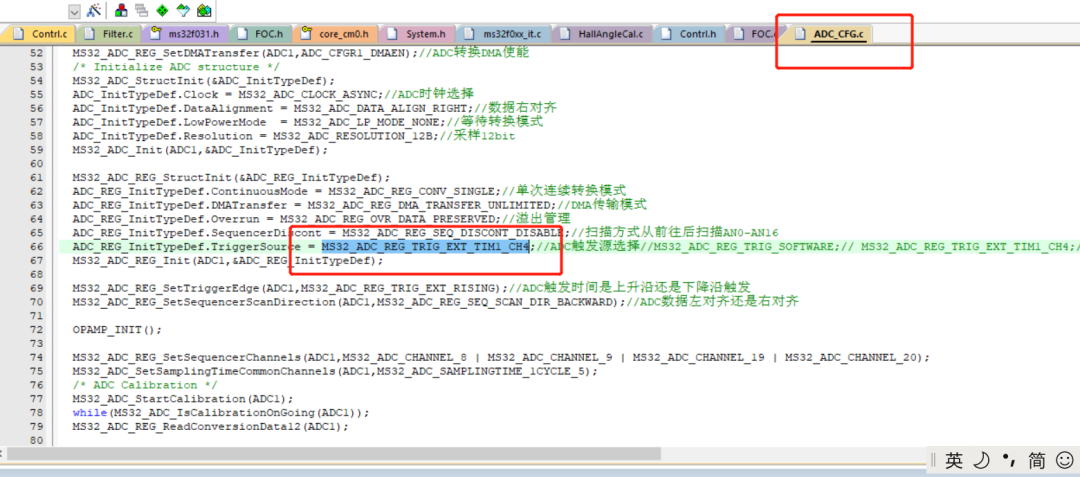
4. 电流采样方式选择
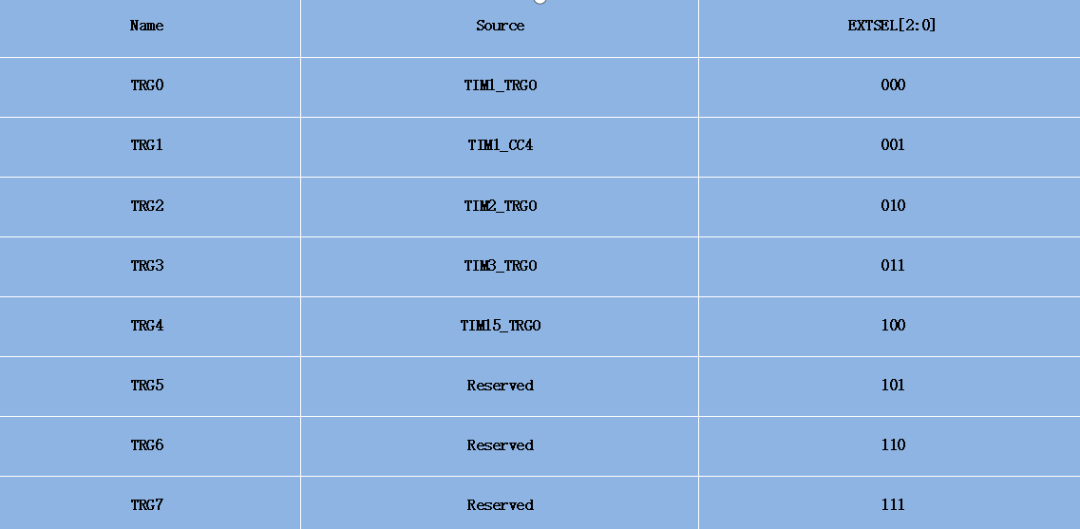
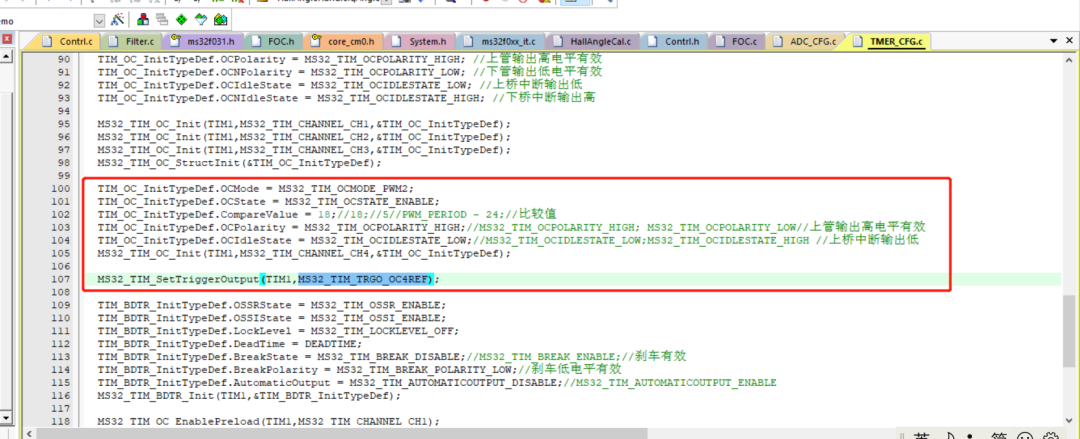
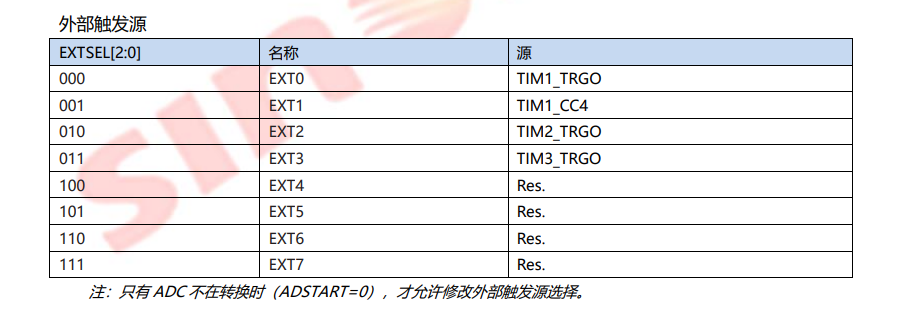
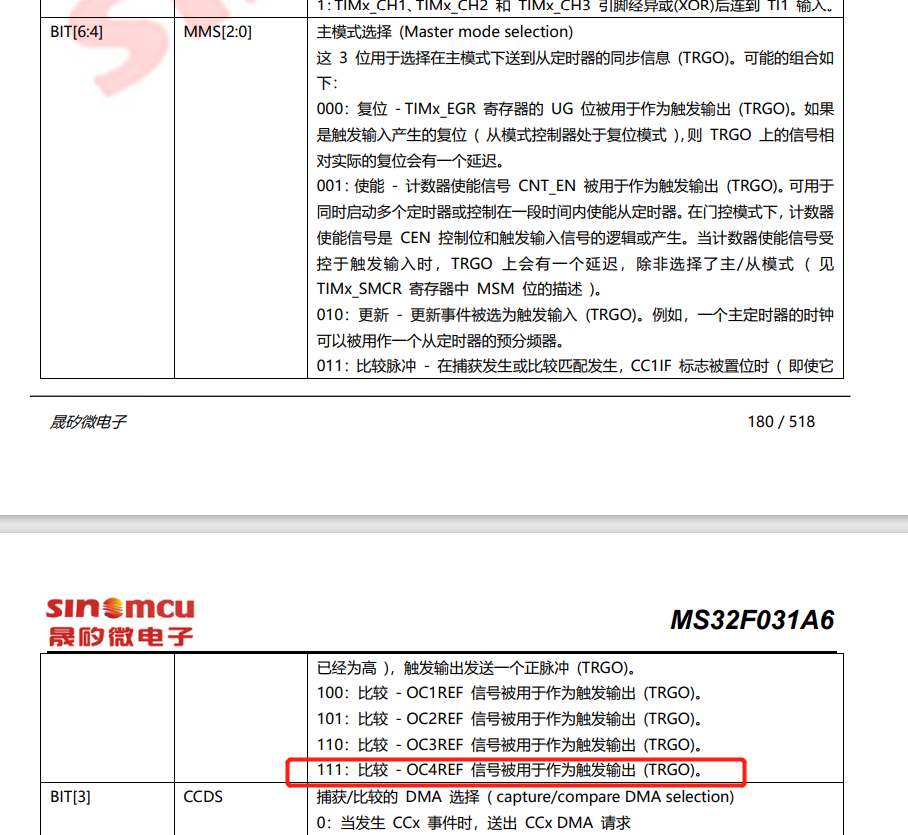
ADC触发源
ADC上升沿触发采样,采用的TIM1-CH4的触发源。
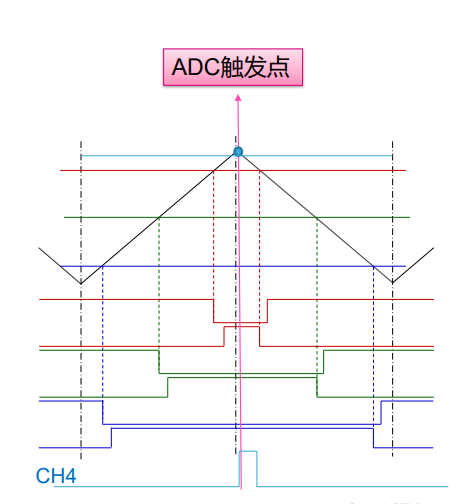
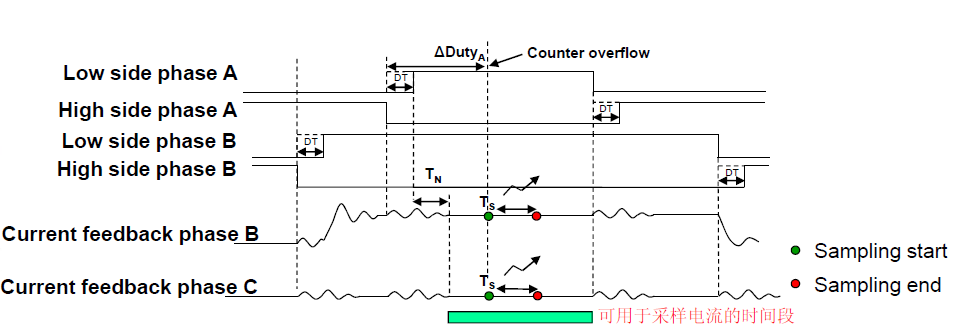
三电阻采样时刻
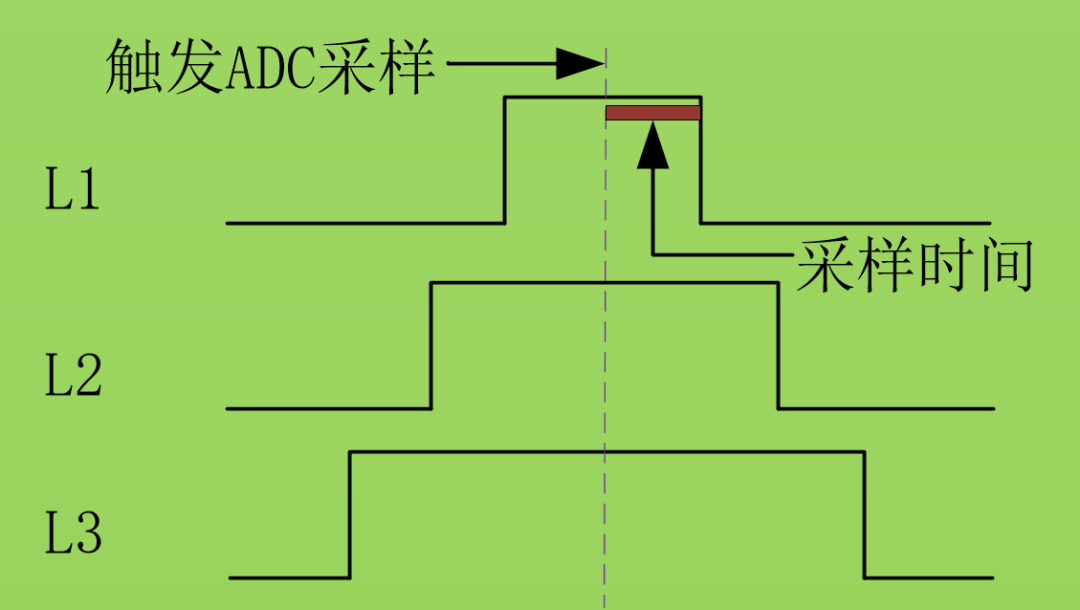
三电阻采样时刻
低频状态,使用中心点采样
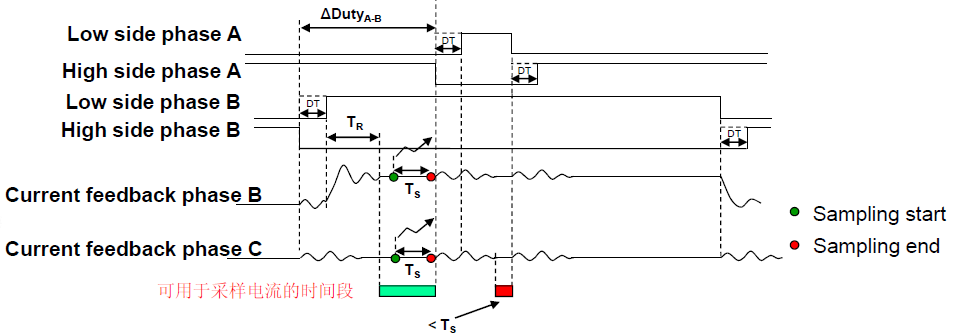
高频状态,改变电流采样点
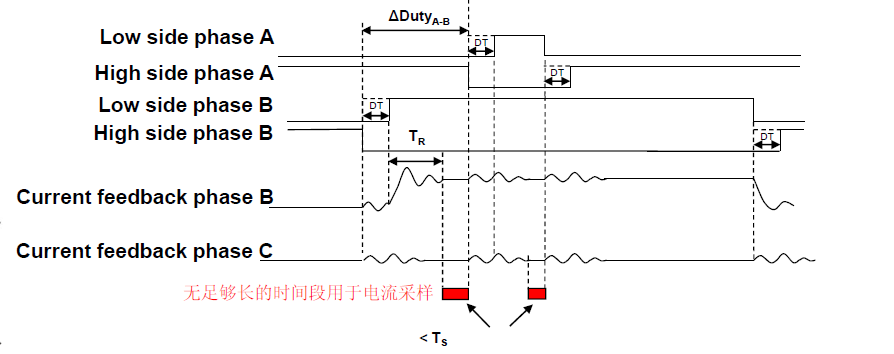
三电阻采样时刻
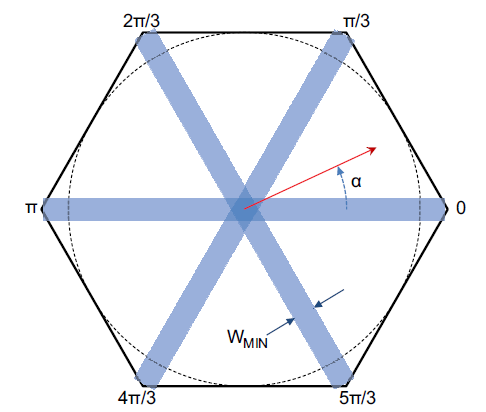
扇区转换和临近零矢量,采样不准确
5. 角度估算器
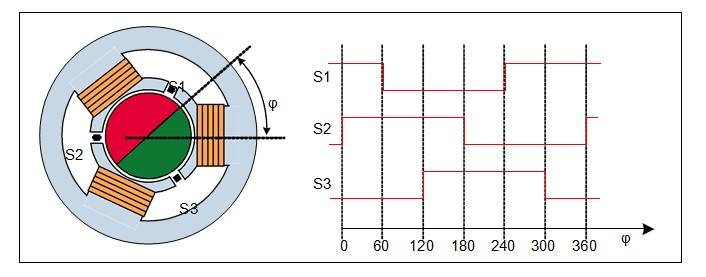
120°HALL电平状态
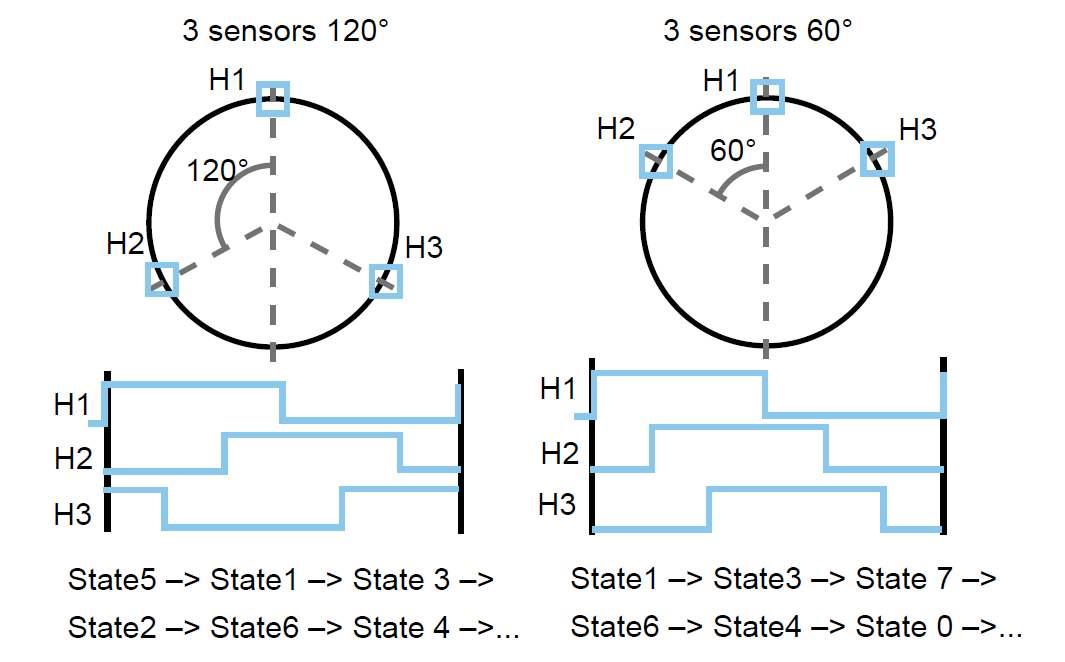
120°及60°HALL区别
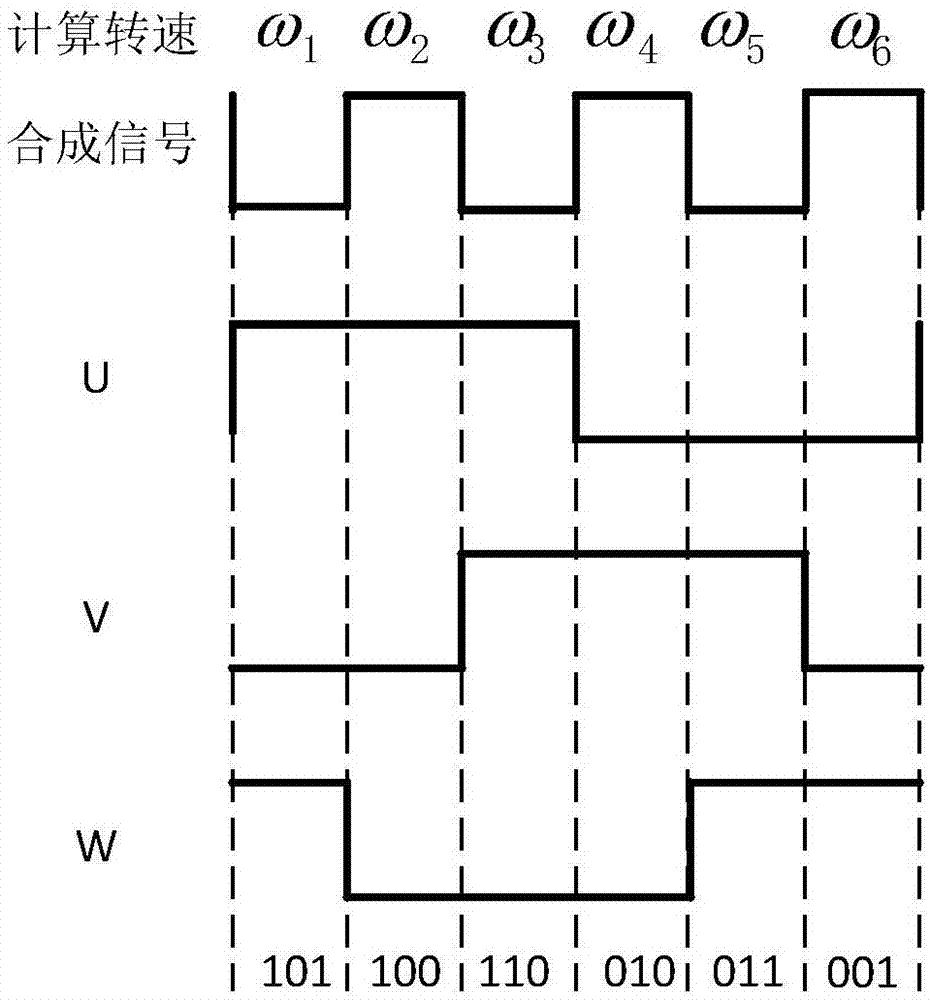
HALL信号及角度关系
矢量控制需要连续的位置信号,需要对角度进行细分,如下图所示:
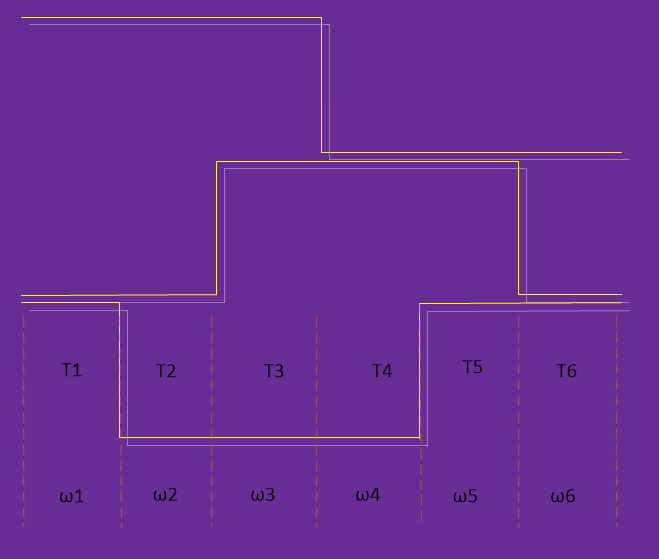
基于HALL信号的角度细分
每个60°电角度hall扇区角速度可以通过公式:
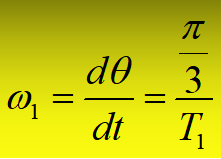
求出,在下一个hall的扇区,可以通过角速度对时间积分求得:
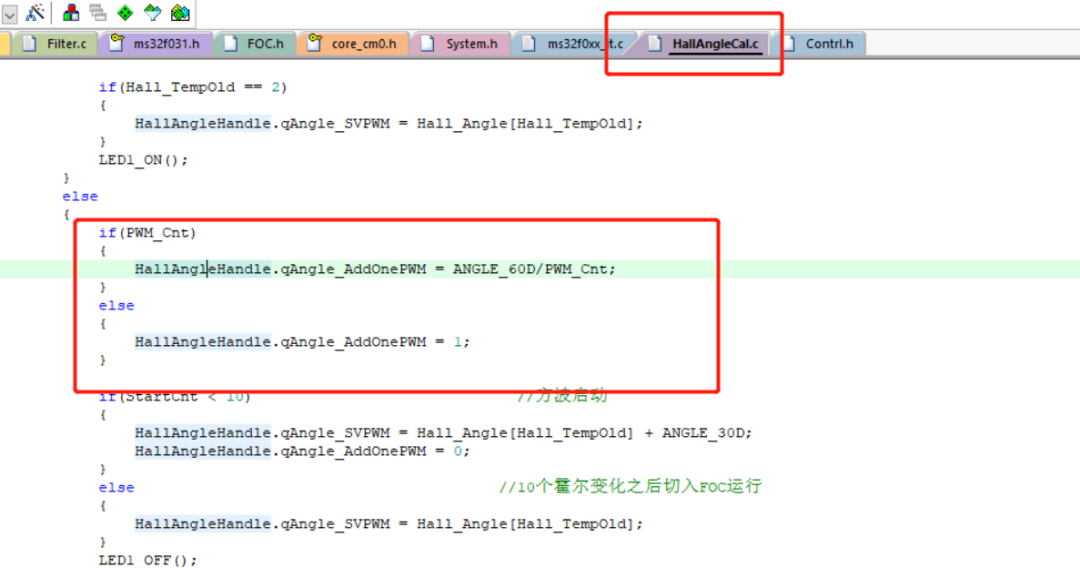
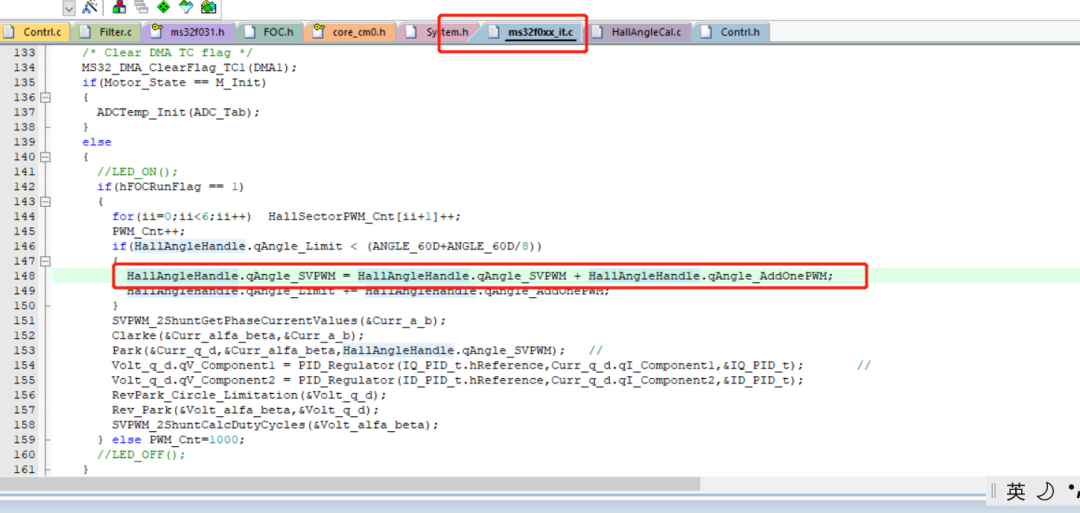
6. 霍尔FOC程序
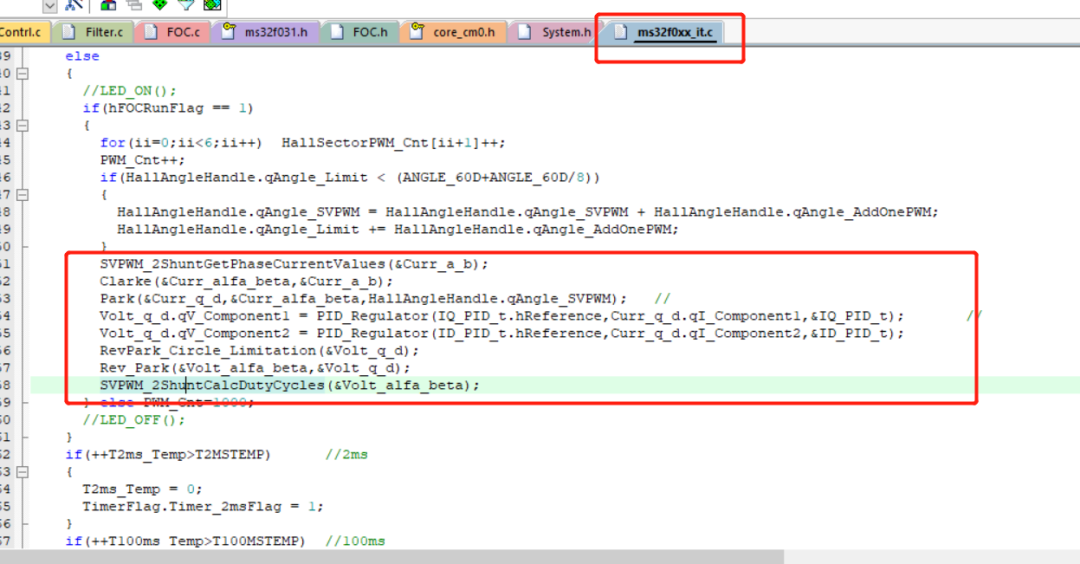
DMA采样完成中断中执行FOC控制程序
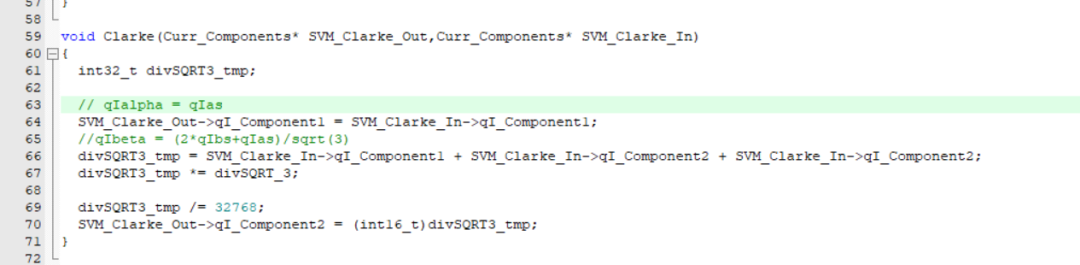
根据Clark变换原则 f(α,β) = (2/3)*f(A,B,C),推到出:
iα=iA
iβ=√3/3 *(iA+2*iB)
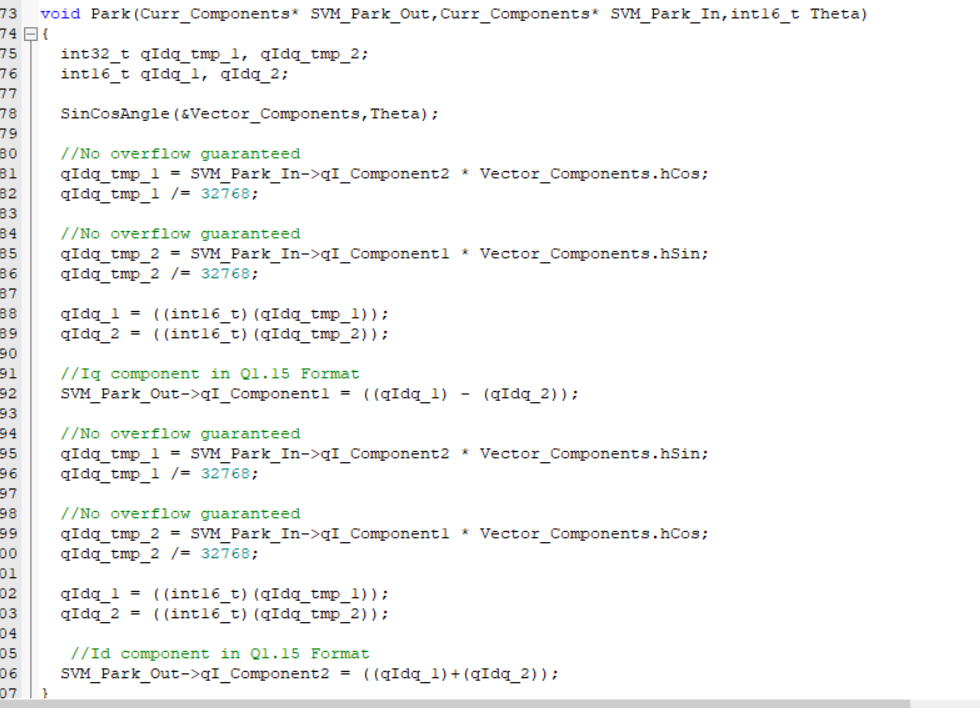
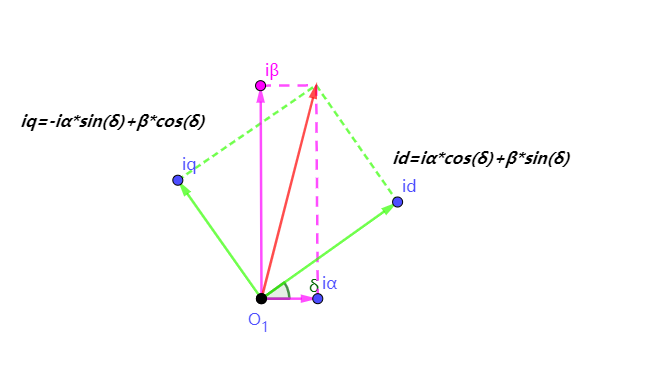
根据Park变换原则,装换成Iq/Id
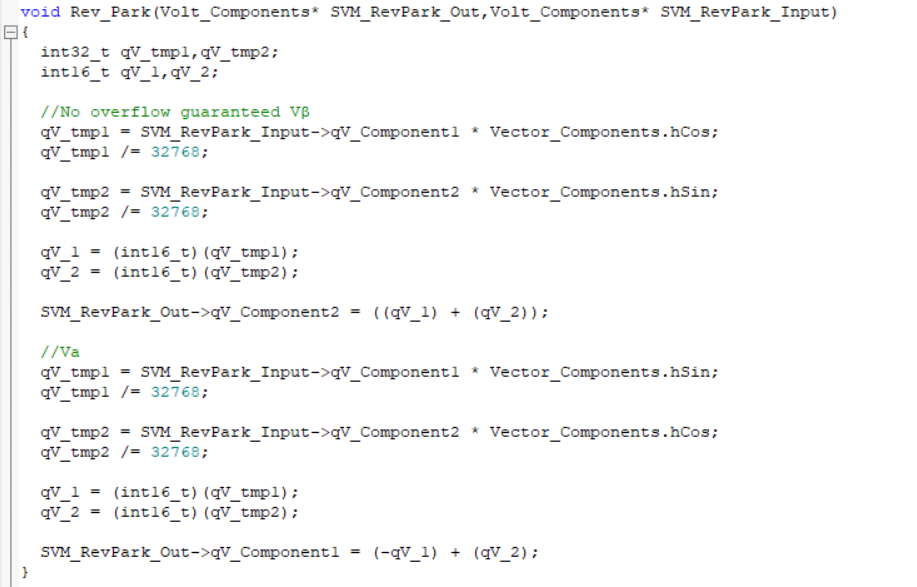
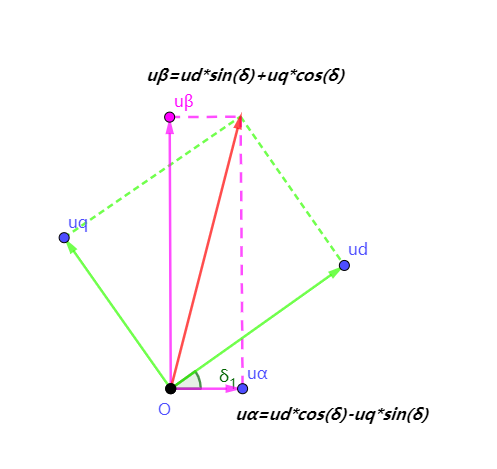
根据Park变换原则,装换成Ua/Uβ
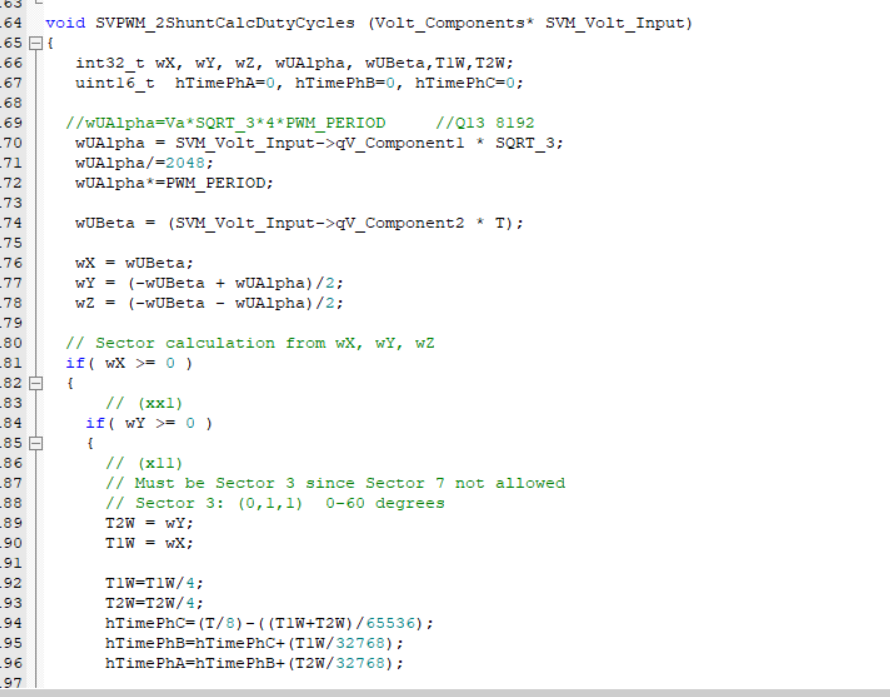
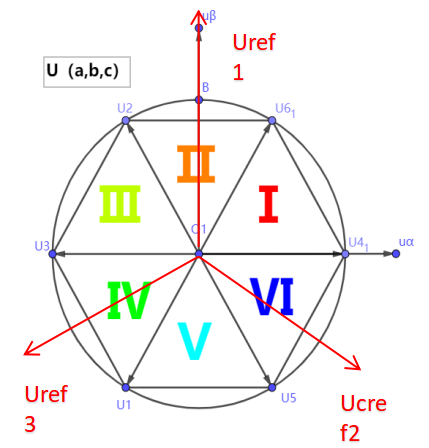
A,B,C对应Uref1,Uref2,Uref3,
正表示1,负表示0;N=A+2B+4C
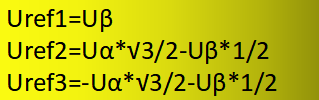
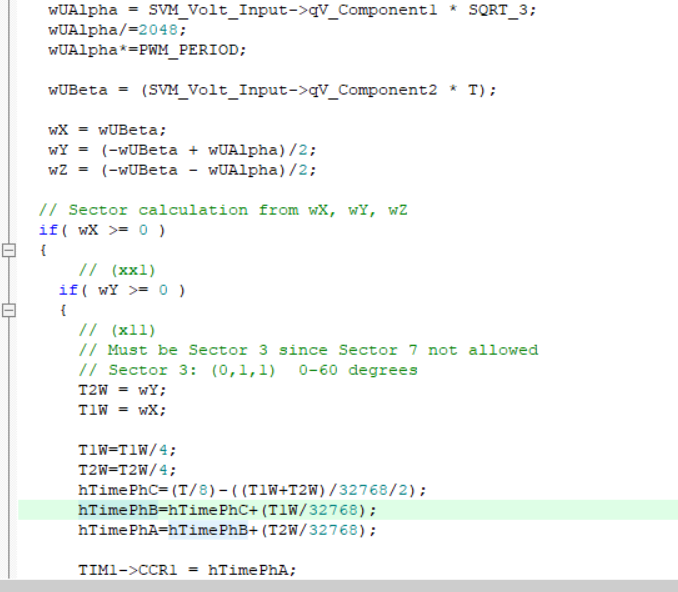
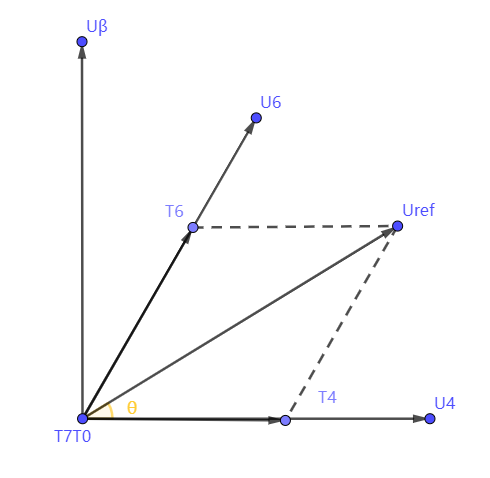
已知Ua和Uβ推到出U4和U6,再推导出T4和T6,根据PWM使用上升下降的计数方式,得到下面公式:
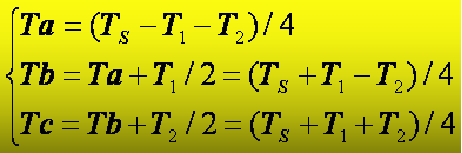
全文完